
Robotique
Plateforme UAV : Unmanned Aerial Vehicles.
Présentation de la plateforme
La plateforme mini-drones du laboratoire Heudiasyc se compose de plusieurs démonstrateurs, d’un environnement logiciel et de support expérimental. Le but de cette plateforme est d’aider à la validation expérimentale des recherches en contrôle commande et en robotique. Les activités de recherche sont principalement la conception, la modélisation et le contrôle de mini véhicules aérien (mutli-rotors).
Les démonstrateurs sont composés de mini drones conçus et réalisés au laboratoire Heudiasyc, tels que les octorotors dans le cadre de l’Equipex Robotex ; ainsi que de quadrirotors de chez Parrot. Les deux types de drones étant compatibles avec notre framework logiciel.
La plateforme est soutenue par les tutelles d’Heudiaysc :
- le CNRS ;
- l’Université de Technologie de Compiègne ;
ainsi que par :
- la région Hauts-de-France ;
- le programme d’investissements d’avenir (PIA) de l’agence nationale de la recherche (ANR) ;
- des projets FUI (fonds unique interministériel).
Historique de la plateforme
Le laboratoire a débuté ses recherches sur les véhicules aériens en 1997, les chercheurs étaient alors considérés comme des pionniers en France dans ce domaine au début des années 2000. L’objectif initial était la conception et le contrôle de mini véhicules aériens ; le contrôle commande et la robotique étant le domaine d’expertise de ce groupe de chercheurs. Cette équipe s’est intéressée à plusieurs configurations : multi-rotors, avions et convertibles (capables de décollage et atterrissage vertical, et de vol horizontal).
Les premiers supports financiers pour ces recherches sont venus de :
- Projets régionaux ;
- Challenges mini drones organisés par l’Onera et la DGA (2003–2005 et 2007–2009).
En 2011, l’Equipex Robotex (du programme d’investissements d’avenir de l’agence nationale de la recherche) a financé cette plateforme de recherche lui permettant d’acquérir des équipements de haut niveau.
Démonstrateurs
MODUL-AIR

- Drones octorotors permettant des tests avancés pour la recherche
- Structure modulaire pouvant intégrer des capteurs haut de gamme (ex : Lidar, GPS RTK, caméras HD, etc)
- Applications de tolérance aux fautes (redondance d’actionneurs), de vision (suivi de ligne automatisé, stabilisation par flux optique)
- Charge utile 1.1 Kg
Flotte de mini-drones

- Drones quadrirotors de prototypage
- Communication inter-drones
- Commande robuste, agressive
- Commande distribuée de flottes
- Applications de vision pour la navigation et le suivi des visages
- Sûreté de fonctionnement
X‑AIR

- Drone octorotor à protection passive, sans structure rigide entre les moteurs
- Permet d’aller au contact des objets ou des personnes sans risque
- Technologie similaire au Modul-AIR
- Valorisation du savoir-faire dans la conception et la réalisation de drones (mécanique, électronique et logiciel)
Hydro-lift

- Forte capacité d’emport
- Grande autonomie utilisant la technologie hydraulique
- Projet mené au sein d’une Chaire Industrielle dédiée à la technologie hydraulique
- Collaboration entre les laboratoires Roberval et Heudiasyc
Support expérimental
Arènes de vol
- Arène de vol intérieure 10x12x6m, équipée de motion capture (24 caméras, précision 1mm), et d’une salle de supervision isolée
- Arène de vol extérieure 18x36x7m, entièrement close, à proximité d’une base GPS RTK
Ateliers
- Laboratoire mobile et base GPS RTK
- Ateliers mécanique, électronique et informatique embarquée



FL-AIR

Le logiciel, appelé FL-AIR (Framework Libre Air) a été développé au sein du service plateformes d’Heudiasyc dans le but de faciliter l’intégration et les essais des algorithmes issus des domaines de recherche.
Ce Framework est basé sur Linux et est compatible avec Xenomai (temps réel); il permet notamment d’abstraire toutes les couches de communication et temps réel. Orienté vers la recherche, la construction d’une station sol permettant de surveiller et d’intervenir sur tous les états du drone est automatique.
Un simulateur, basé sur le Framework FL-AIR, a également été développé afin de pouvoir tester en toute sécurité les programmes sur un PC avant tout vol réel. Ainsi, toutes les erreurs de programmation peuvent être identifiées et corrigées sans risque. Un environnement 3D permet également de simuler tous les capteurs embarqués dans le drone (caméra, LIDAR, etc).
FL-AIR est un logiciel open source et protégé par l’Inter Deposit Digital Number : IDDN.FR.001.490010.000.R.P.2015.000.20600.
FL-Air est téléchargeable à l’adresse suivante : https://gitlab.utc.fr/uav-hds/flair/flair-src
CUSCUS
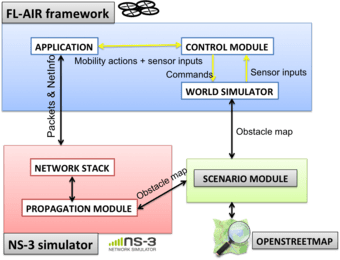
La fusion actuelle des domaines de recherche en réseau et en contrôle, dans le cadre des applications robotiques, crée des opportunités de recherche et développement fascinantes. Cependant, les outils pour une gestion correcte et facile des expériences restent à la traîne.
Nous comblons cette lacune en proposant un nouveau simulateur pour le contrôle des systèmes en réseau, appelé CommUnicationS-Control distribUted Simulator (CUSCUS). Différemment de l’état de l’art, CUSCUS permet de simuler à la fois un /réseau d’UAV et leur contrôle de vol/, via l’intégration de deux outils existants: le simulateur Framework Libre AIR (FL-AIR) et le simulateur de réseau grand public [NS‑3].
CUSCUS comprend également un module de scénario pour faciliter le chargement des scénarios, directement depuis OpenStreetMap.
Front-end (Under Construction at UTC GitLab)
Back-End (available at UTC GitLab): https://gitlab.utc.fr/zemanico/CUSCUS